Topic 2 About the Technology
| Site: | TAFE SA Learn |
| Course: | Micro-credential - Drones in Agriculture |
| Book: | Topic 2 About the Technology |
| Printed by: | Guest user |
| Date: | Tuesday, 23 September 2025, 12:59 AM |
Description
Use the link above to access the content or use the table of contents to the right to move between chapters when you revisit this information. Use 'Next' and 'Previous' to move between the pages.
If your preference is to use an alternative format you will find the option in each topic just below the books.

Image used
under license from Shutterstock.com
1. The Technology
All drones are an airframe with a series of individual components managed via software to make them fly.

Image used under license from Shutterstock.com
1.1. Inertial Measurement Unit
The IMU or Inertial Measurement Unit is a small onboard computer that houses the software to fly the RPA. The software via the IMU takes information from the onboard GPS, Compass, barometer altimeter, and accelerometers processes it, and delivers information out to the motors via their ESC (Electronic Speed Controllers). In the case of the Mavic 2 Pro, each of the 4 motors has its ESC which controls power to a small brushless motor. It’s the power or the torque of each of these motors that determine the lift and direction of the device via the motors propellers(aerofoils). Depending on the model of RPA these aerofoils can spin up to 10 thousand RPM or higher. The integration of all the critical control components and software is referred to as the Flight Control System (FCS). This control system is monitoring and acts on signal and sensor information hundreds of times a second.
Check your knowledge using the quiz below.
RPA IMU – Device can often contain IMU GPS and other components as one unit

1.2. Compass
The onboard compass measures the direction of the earth’s magnetic field.
The compass on drones is calibrated through a simple calibration process when first setting up your device. This is done to align the drone's flight system with magnetic north. It is how the onboard navigation system manages the earth’s shifting magnetic field and establishes the local magnetic declination. (The number of degrees between magnetic and true north). It would be something familiar to any hikers who use a map and compass rather than GPS to establish bearings when navigating.
Check your knowledge using the quiz below.
Image used under license from Shutterstock.com
1.3. GPS
Just like the GPS for hiking or on your phone, the onboard GPS uses satellite communications to calculate the position of the craft. This is often combined with data from the accelerometer to calculate location and speed.
This fusion of sensor data is important as each on its own can’t always give an accurate position. Where GPS uses a triangulation of singles from satellites to find a single location it can be difficult when the aircraft is moving fast. The accelerometer uses the crafts acceleration and angle to calculate its position. It’s a method very similar to an older type of maritime navigation called dead reckoning. With reading reckoning, a ship's position was calculated based on its compass angle, speed, and time it took to travel to the next mark. With drones, the data for these sensors are used to correct each other small errors to get the position accuracy.
For farmers, some drones now come with advanced GPS systems such as RTK. RTK or Real-Time Kinematic is a real-time correction system that combines live connection with satellites, photos, and a known ground station to establish finer accuracy in its location.
Here is an Australian distributor if you would like more information. https://www.riseabove.com.au/dji-phantom-4-multispectral-combo
Image used under license from Shutterstock.com
1.4. Barometric Altimeter
This component uses changes in air pressure to assist with determining the height of the RPA. The data from this device and the GPS are combined to improve accuracy. Some models also use downward-facing ultrasonic sensors. These are generally only accurate at lower levels. On the Mavic 2 Pro, these are combined with vision sensors to improve this capability.
1.5. Collision Avoidance
One of the most important features to consider when choosing a drone for your business is its collision avoidance capability. The ability of an aircraft to analyse its environment during flight, identify danger, and alert or avoid obstacles or hazards is critical in any flight mission. This technology makes flying reliable and less likely to fail to cause property damage or injury. Depending on the model you deploy the amount of collision avoidance technology available will differ. Generally, your aircraft will identify any area of danger around structures or blocking vegetation. Some will alter their flight path during a mission if obstacles are encountered. Others will just alert the pilot when danger is close and prevent the craft from going too close to danger. In an emergency, most drones have a return to home feature the pilot can activate if required. This function would be dangerous to use if the pilot loses sight of the aircraft and needs to fly the craft home blind. The collision avoidance systems will alter course around obstacles without pilot intervention and return home safely.
To watch a video about a model drone with collision avoidance technology watch this.
Obstacle Sensing & Vision Positioning [2.48]
1.6. Controller
There are a variety of controller systems available on the market. They can be dedicated devices such as the DJI smart controller or simply software loaded onto a smartphone or tablet. Be mindful that in bright sunny conditions, the screen can be hard to see so a good quality large screen is important. Also, under Australian Law, you must always have a visual line of sight of your vehicle while flying. Relying on the screen alone to pilot your aircraft is dangerous and illegal.

DJI Smart Controller - Image sourced from DJI Authorised Retail Store
2. RPA Aerodynamics
This section relates specifically to multi-rotor or copter drones. Several models of fixed-wing drones are also used in the agricultural and mining sector. The aerodynamics and flight control systems of these systems are like larger fixed-winged aircraft and not covered here However the general aeronautical terminology used here is common to both.
Like all rotor-powered flights, Drones use airfoils or propellers to apply an upwards force that offsets the weight of the aircraft. This is force is referred to as lift. The force that opposes movement through the air is referred to as drag. The movement of air over aerofoils such as wings on a fixed-wing plane or propellers on a helicopter or Drone produces areas of low and high static pressure. It’s these variations of pressure that produce lift. In a fixed-wing aircraft lift, is controlled by the angle of attachment of the curved surface of the wing. The height of the aircraft and the direction are controlled by stabilisers, flaps, and rudders. Helicopters do this by altering the angle of the central rotors and opposing force from the spinning tail rotor. On a drone, all lift and direction are controlled by the amount of power or (Revolutions Per Minute) applied to any of the 4 motors at any one time. For the Drone to remain stable, the aircraft is designed so the propellers rotate in pairs in opposite directions to each other. This opposing rotating motor configuration manages the torque generated by the spinning motors. By applying different RPMs (Revolutions Per Minute) to specific pairs of motors the aircraft will use the resulting torque to change direction.

This is important to understand as each propeller is designed specifically for its place on the aircraft. Unlike a helicopter, the angle of attack of the propellers is fixed so variations in revolutions (RPM) manage the flight.
AOT (Angle of attack) is the angle of the blades of the center rotor. A steep angle of attack gives more lift but takes more power to move through the air and can cause the aircraft to stall. A shallow angle of attack moves the blade through the air easier but will require more RPMs and power to move the aircraft. If the AOT is too small the aircraft will not produce enough lift and not fly.
The small grey ring around the centre of each rotor determines which of the four motors they belong to.
For the RPA to lift and manoeuvre the pilot sends signals to the RPA via the controller. These commands primarily control the amount of power applied to each motor. For the device to rise the 4 motors increase power or Revolutions Per Minute (RPM) all at the same time.
Check your knowledge using the quiz below.
2.1. Drone flight direction
There are a few terms sits useful to understand when describing flight control for drone work. They are standard aeronautical terms that apply to most rotor and fixed-wing aircraft. Terms like hover are used for aircraft such as drones or helicopters.

Image used under license
from Shutterstock.com
Check your knowledge using the quiz below.
2.2. Vertical lift
Vertical lift as the term suggests is the motion of the aircraft vertically.
Hover or Hover Still - For the drone to hover all four motors are supplied power via the Flight Control System (FCS) to equal the gravitational weight of the vehicle.
Ascend or Climb Ascend - For the aircraft to raise the RPMs supplied by the flight control system exceeds the gravitational weight of the aircraft. This thrust causes the aircraft to rise.
Descend or Vertical Descend – Just as Ascend if the power to the motors is reduced so the thrust is less than the gravitational weight of the aircraft it will descend. The FCS will normally take control of this to descend when landing as too fast descent can cause the device to stall and fall.
2.3. Vehicle Direction
There are some specific terms for lateral direction control of the drone. Again, these are standard aeronautical terms and help understand the direction of your aircraft during flight.
Yaw – This term refers to the rating of the device around its centre. Imagine your drone is a top and it's spinning. This movement is achieved by power being supplied by a pair of motors opposite to each other. This power increase causes torque to spin the aircraft.
Pitch – Pitch is the movement of the aircraft forward or backward. This is achieved by increasing RPMs to the back pair of motors lifting the back and pushing it forward. By doing the opposite and increasing the power to the front pair the aircraft will fly backward.
Roll – Roll as far as drone flight is concerned is to move the aircraft left or right. The FCS is designed on most drone systems to stop the vehicle from rolling as it will crash. A roll in this context is enough to power supplied by the FCS to the left or right pairs of motors that lift the side and move it in the opposite direction. Adding power to the right pair of motors raises that side of the aircraft and pushes it left. Power to the left will send it right.
The pilot uses the sticks on the controller to supply these changes in power. Combinations of these stick controls can make the drone flight in any configuration the pilot can apply. The Flight Control System will manage any movements or actions that cause the drone to stall or crash.
Images used under license from Shutterstock.com
Check your knowledge using the quiz below.
2.4. Drone Motor Configurations
Drone manufacturers are constantly designing new aircraft configurations and capabilities. Keeping up with can be quite a challenge. Understanding a little about the differences can help when exploring what machine best suits your business needs.
Essentially most entry-level drones fit into the quadcopter category. This means they are four motor devices. This configuration includes lighter micro drones up to some medium-sized models. When larger lifting capacity is required for applications, such as spraying, or payload delivery then devices such as Hexa-rotor or Octo-rotor machines are available. They are often used in larger camera systems not only for their load carrying capacity but their stability. Some systems also have a level of redundancy as they can stay in flight if a motor fails.
Larger machines are heavier and require larger battery systems. They also are in a weight category that requires specific pilot licensing.
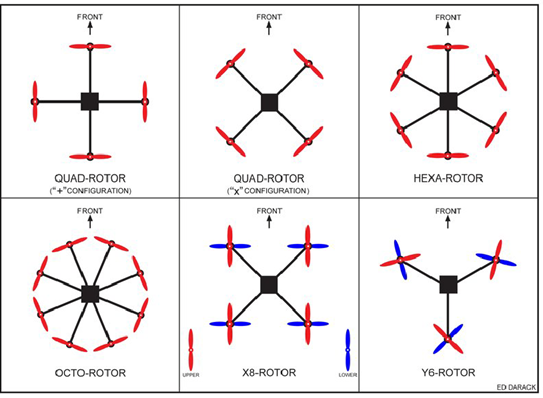
Image by Ed Durack
Diagram showing the possible configurations with the hoverfly multi-rotor control board
2.5. Weight categories
In Australia, the Civil Aviation Safety Authority (CASA) classifies drones into specific size categories by weight. Most entry-level drones fit into the Micro (250g or less) and the Very Small (250.1g to 2kg) This under 2 kg classification is important as it does not require a drone pilot license to fly in most home situations.
It is important to become familiar with the CASA organisation and your responsibility as a drone owner/pilot.
3. Topic wrap up
Complete the Activity and Discussion Forum to wrap up this chapter